Gəmi gövdələrinin tam avtonom dronlarla yoxlanılmasının mümkünlüyü sübut edilib
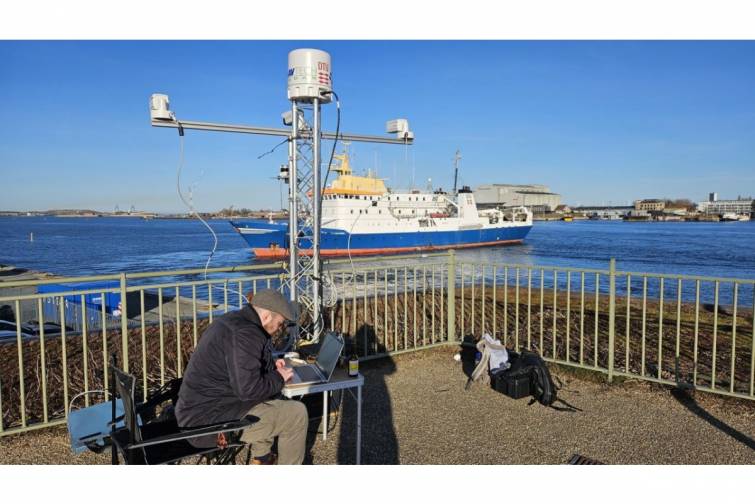
İspaniyanın "IQUA Robotics" robototexnika firması, avtonom sualtı aparatların (AUV) insan müdaxiləsi və ya kabelli avadanlıqlar olmadan gəmi gövdələrini sistematik şəkildə yoxlaya bildiyini sübut edən sınaqları uğurla başa vurub. Bu nailiyyət kommersiya gəmilərinin tam avtomatlaşdırılmış profilaktik baxışı istiqamətində mühüm addım hesab olunur.
“Seanews.az” xəbər verir ki, sınaqlar real liman mühitində dörd fərqli gəmi (balıqçı, tədqiqat və hərbi gəmilər) üzərində aparılıb. "Sparus II AUV" aparatı yoxlama zamanı gəmi gövdəsinin profilini real vaxt rejimində müəyyənləşdirir, gəmi ilə sabit məsafəni qoruyaraq, səthi tam və bərabər şəkildə əhatə etmək üçün "otbiçən" (lawnmower) modelinə uyğun hərəkət edir. Hər hansı texniki nasazlıq baş verdikdə, aparatın gəminin altında ilişib qalmasının qarşısını alan avtomatik qaçış manevrləri aktivləşir.
Sınaqlar nəticəsində gəmi gövdəsinin santimetr dəqiqliyi ilə rəqəmsal 3D bərpası əldə edilib. Bu, korroziya, bioloji çirklənmə (yosunlaşma) və boya zədələrini asanlıqla müəyyən etməyə imkan verir. Sistem həmçinin sonar məlumatları əsasında detallı 3D "nöqtələr buludu" (point clouds) hazırlayıb.
Buna baxmayaraq, bəzi texniki çətinliklər hələ də qalmaqdadır. Belə ki, gəminin arxa hissəsi (stern), pərlər və sükan ətrafında akustik əks-sədalar izləmə prosesini çətinləşdirir. Həmçinin gəminin yan tərəflərindəki yüksək işıq fərqi görüntüləməyə mane olur.
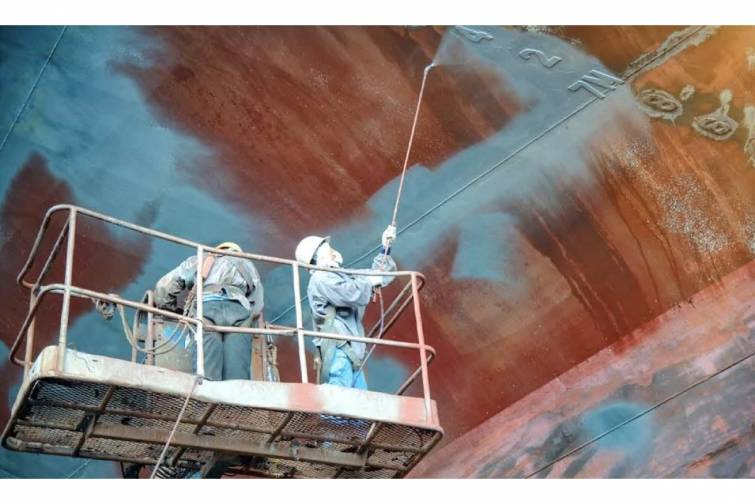
Hazırda gəmi yoxlamaları bahalı, vaxt aparan və potensial təhlükəli olan dalğıc xidmətlərindən və ya daimi insan nəzarəti tələb edən kabelli robotlardan (ROV) asılıdır. Santimetr dəqiqliyi ilə məlumat təqdim edən bu avtonom texnologiya, qlobal donanma üzrə quru dok hazırlıq vaxtını qısalda, texniki baxışın planlaşdırılmasını təkmilləşdirə və yoxlama xərclərini əhəmiyyətli dərəcədə azalda bilər.